Brian Vander Plaats
Developer
Graph Data Structure Cheat Sheet
Developer
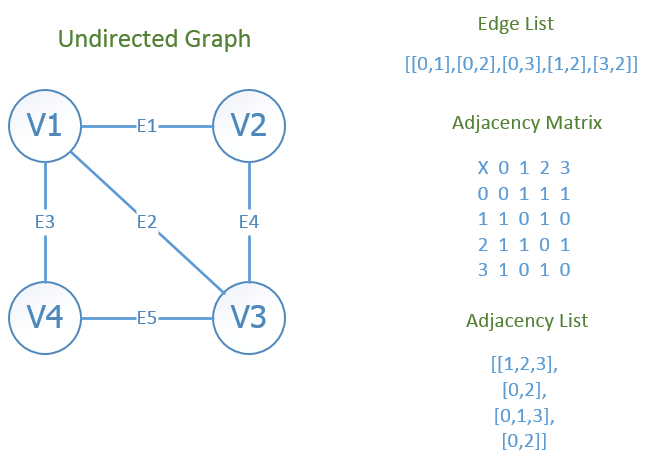
A graph is an abstract data type that consists of a finite set of vertices together with a set of edges connecting the vertices.

adjacent(G,x,y) - check if edge between x and yneighbors(G,x) - list all vertices y that there is an edge from x to yaddVertex(G,x) -removeVertex(G,x) -addEdge(G,x,y) -removeEdge(G,x,y)getVertexValue(G,x)setVertexValue(G,x,v)getEdgeValue(G,x,y) - if assigning weights to edgessetVertexValue(G,x,y,v) [ [0,1], [0,6], [0,8], [1,6]]
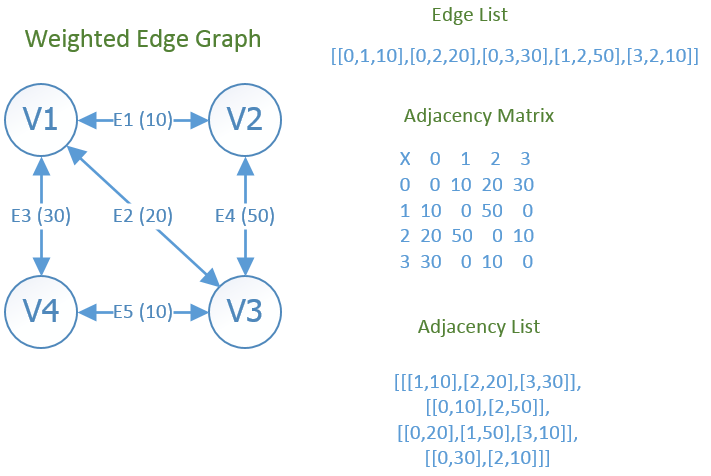
[ [0,1,20], [0,6,50], [0,8,10], [1,6,70]]
# Undirected Graph Implementation - Edge List
def adjacent(graph, vertex1, vertex2):
for e in range(0, len(graph)):
if graph[e][0] == vertex1 and graph[e][1] == vertex2:
return True
elif graph[e][0] == vertex2 and graph[e][1] == vertex1:
return True
return False
def neighbors(graph, vertex):
neighbors = []
for e in range(0, len(graph)):
if graph[e][0] == vertex:
neighbors.append(graph[e][1])
elif graph[e][1] == vertex:
neighbors.append(graph[e][0])
return neighbors
def addEdge(graph, vertex1, vertex2):
graph.append([vertex1, vertex2])
edgeList = []
addEdge(edgeList, 0,1)
addEdge(edgeList, 0,2)
addEdge(edgeList, 0,3)
addEdge(edgeList, 1,2)
addEdge(edgeList, 3,2)
print("V1->V2 " + str(adjacent(edgeList, 0,1)))
print("V2->V1 " + str(adjacent(edgeList, 1,0)))
print("V1->V3 " + str(adjacent(edgeList, 0,2)))
print("V1->V4 " + str(adjacent(edgeList, 0,3)))
print("V2->V4 " + str(adjacent(edgeList, 1,3)))
print("V1: " + str(neighbors(edgeList, 0)) )
print("V2: " + str(neighbors(edgeList, 1)) )
print("V3: " + str(neighbors(edgeList, 2)) )
print("V4: " + str(neighbors(edgeList, 3)) )
print(edgeList)
[ [1,6,8],
[0,4,6,9],
[4,6] ]